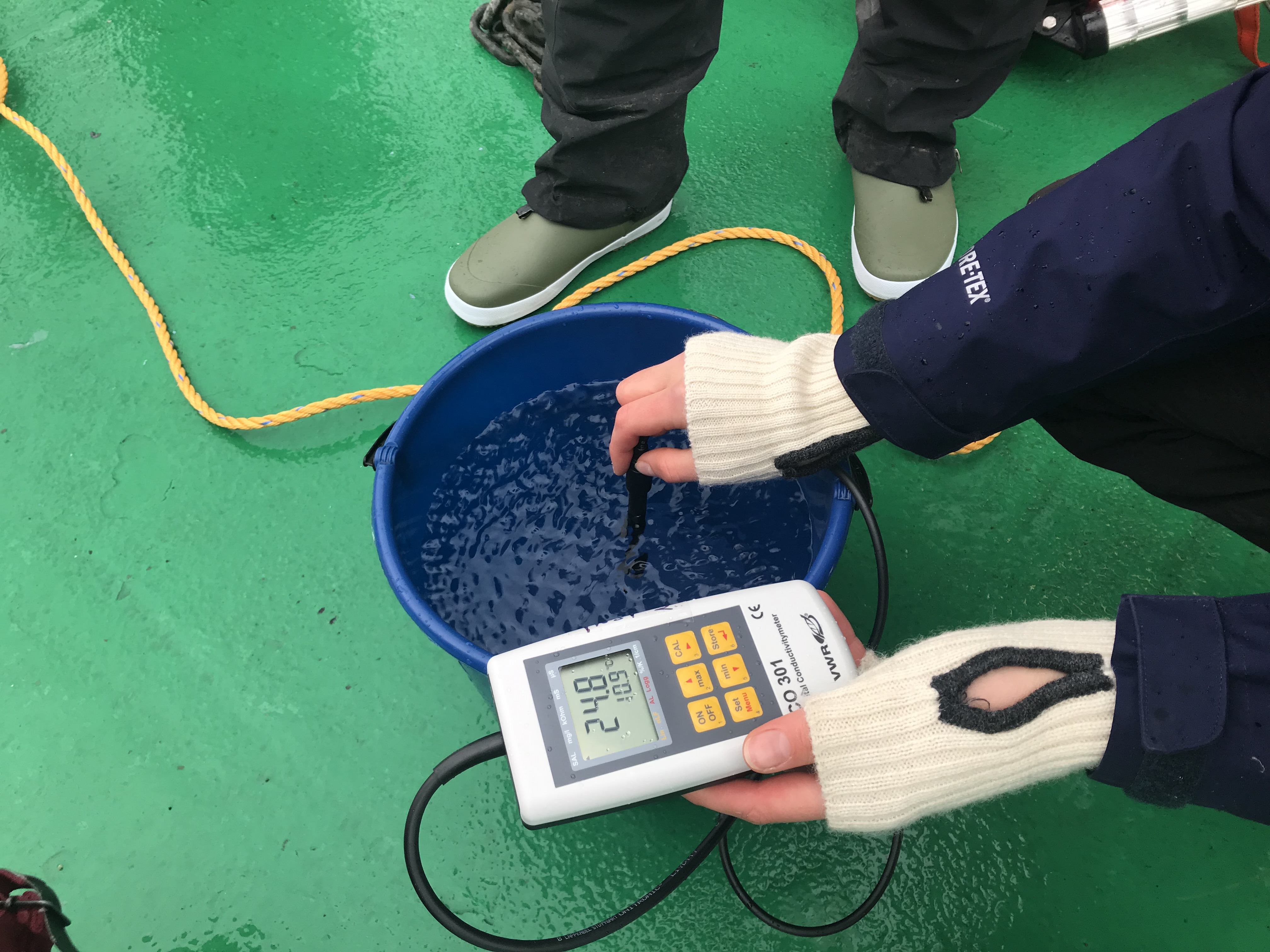
Wave watching in a bucket
On the GEOF105 student cruise that I was lucky enough to join like I did last year, I happened to observe what you see in the picture above: Standing waves in a bucket! And this isn’t a staged photo, this is me taking a picture of a student at work. We are looking at the […]

