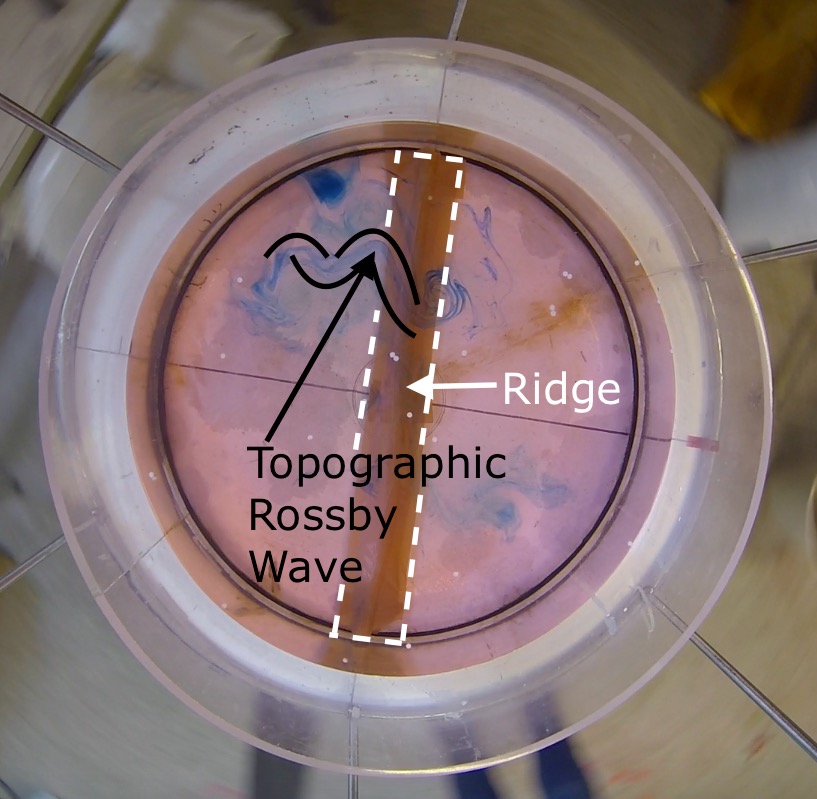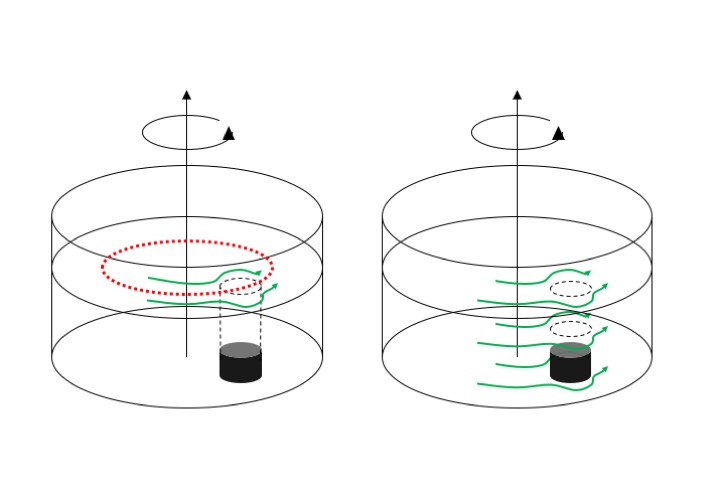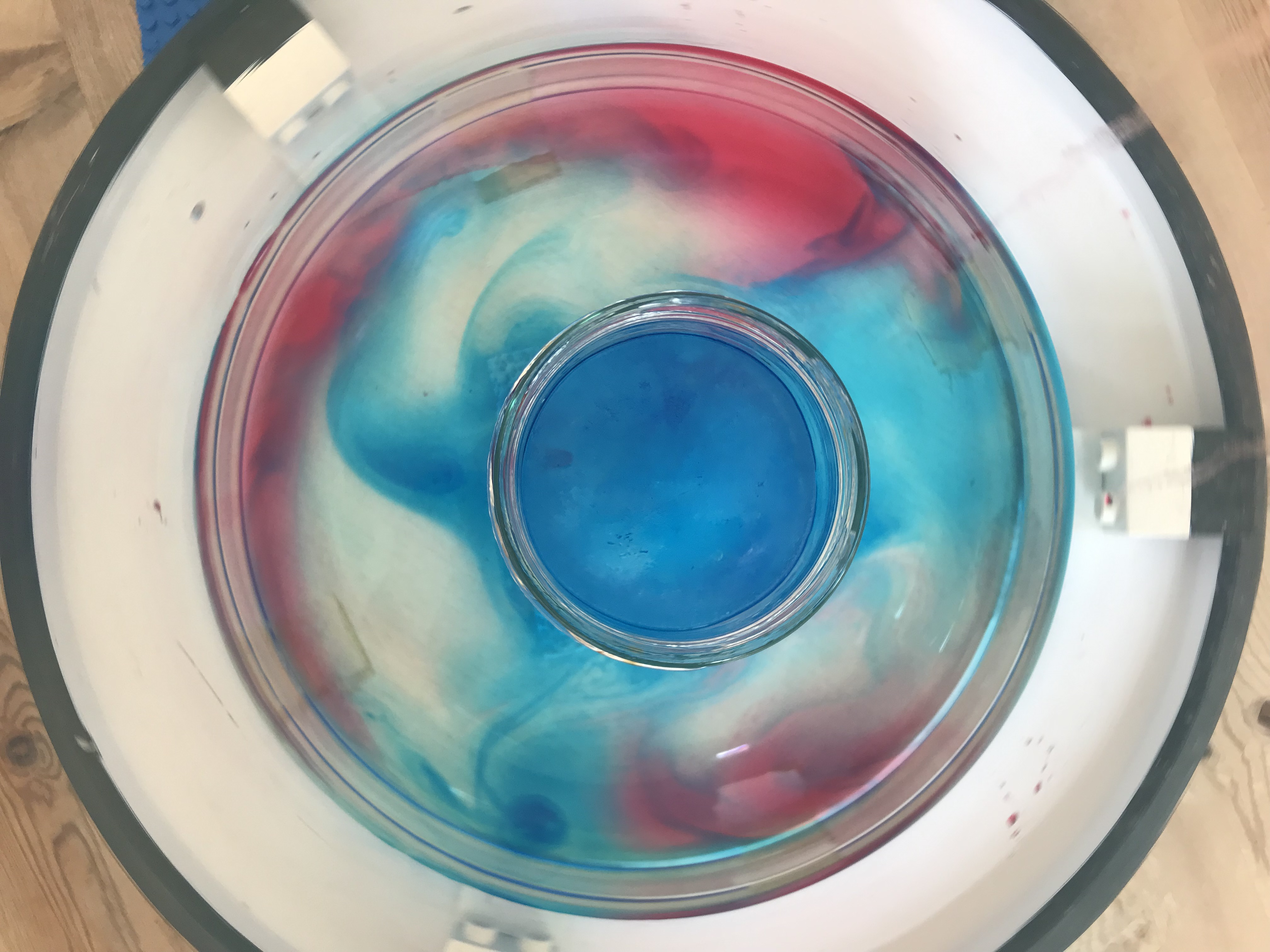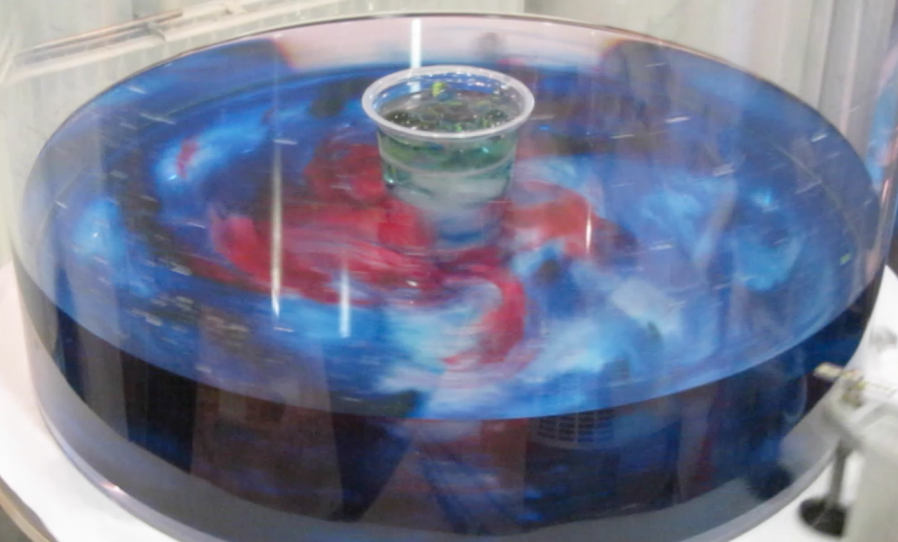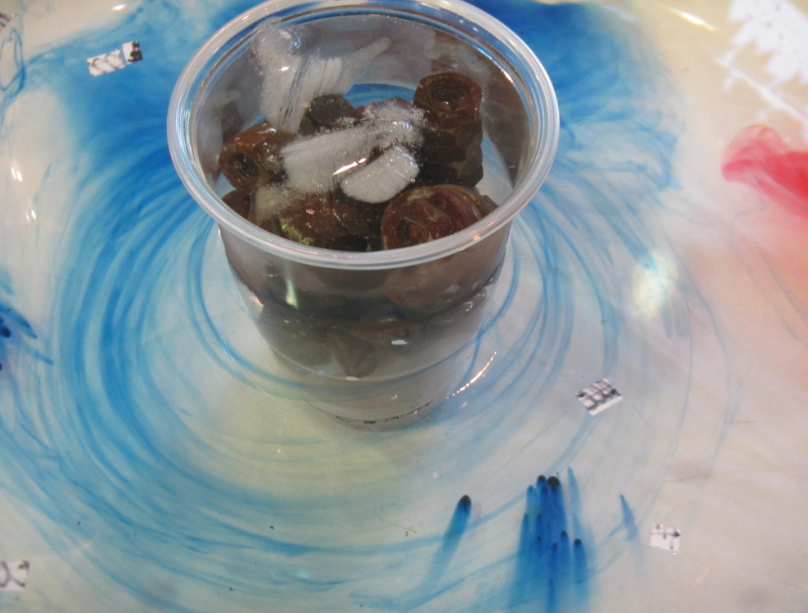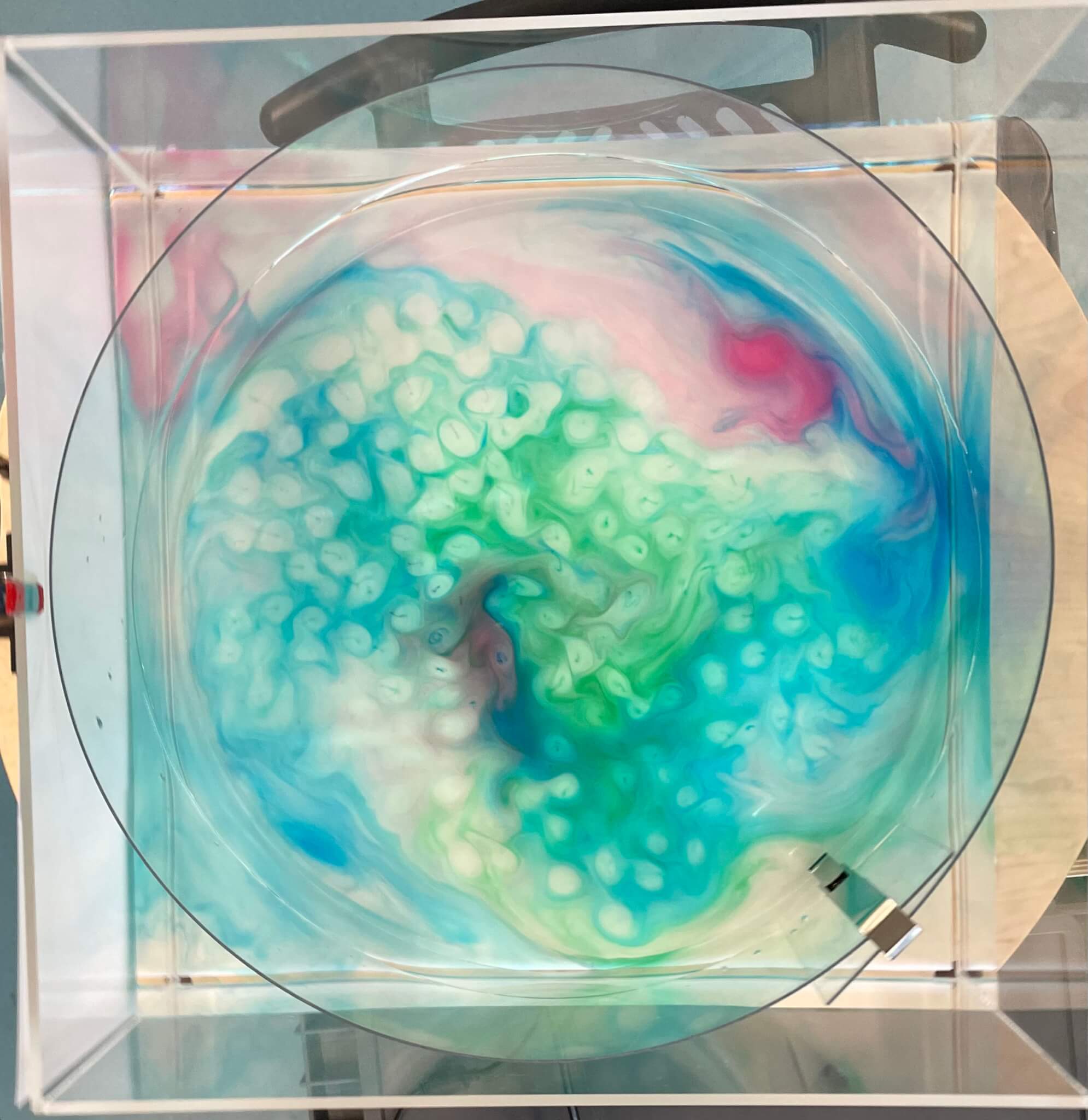
BABY I’M BACK! What are these weird cells in the rotating tank?
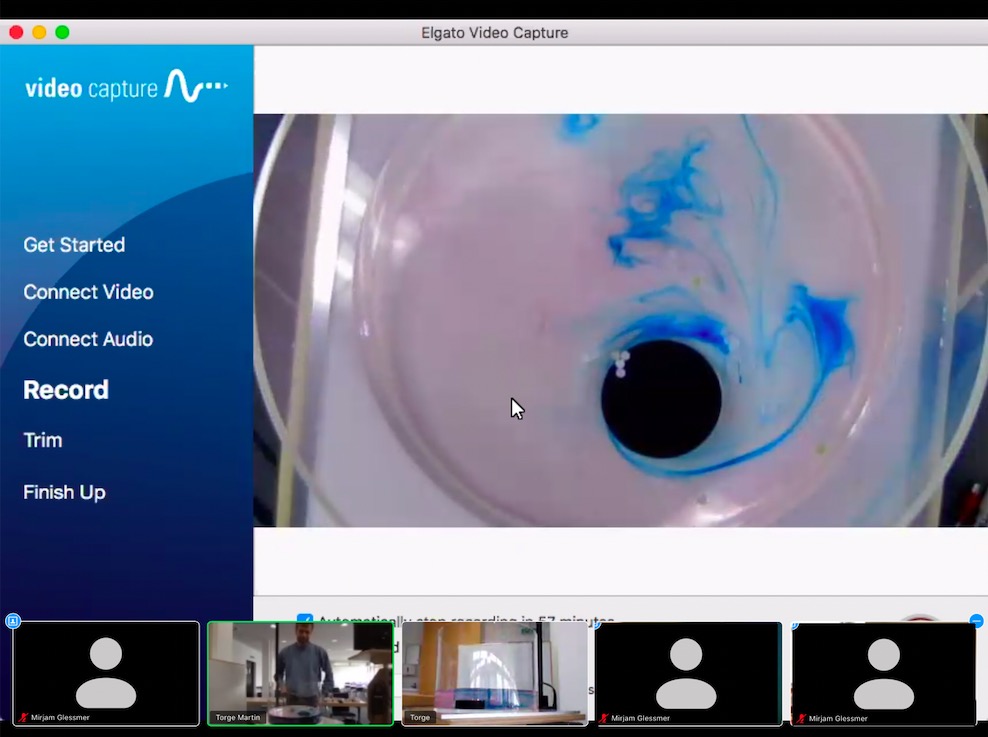
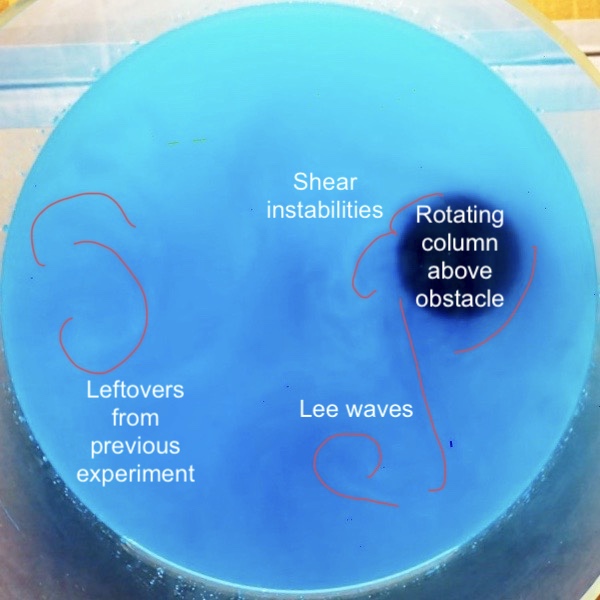
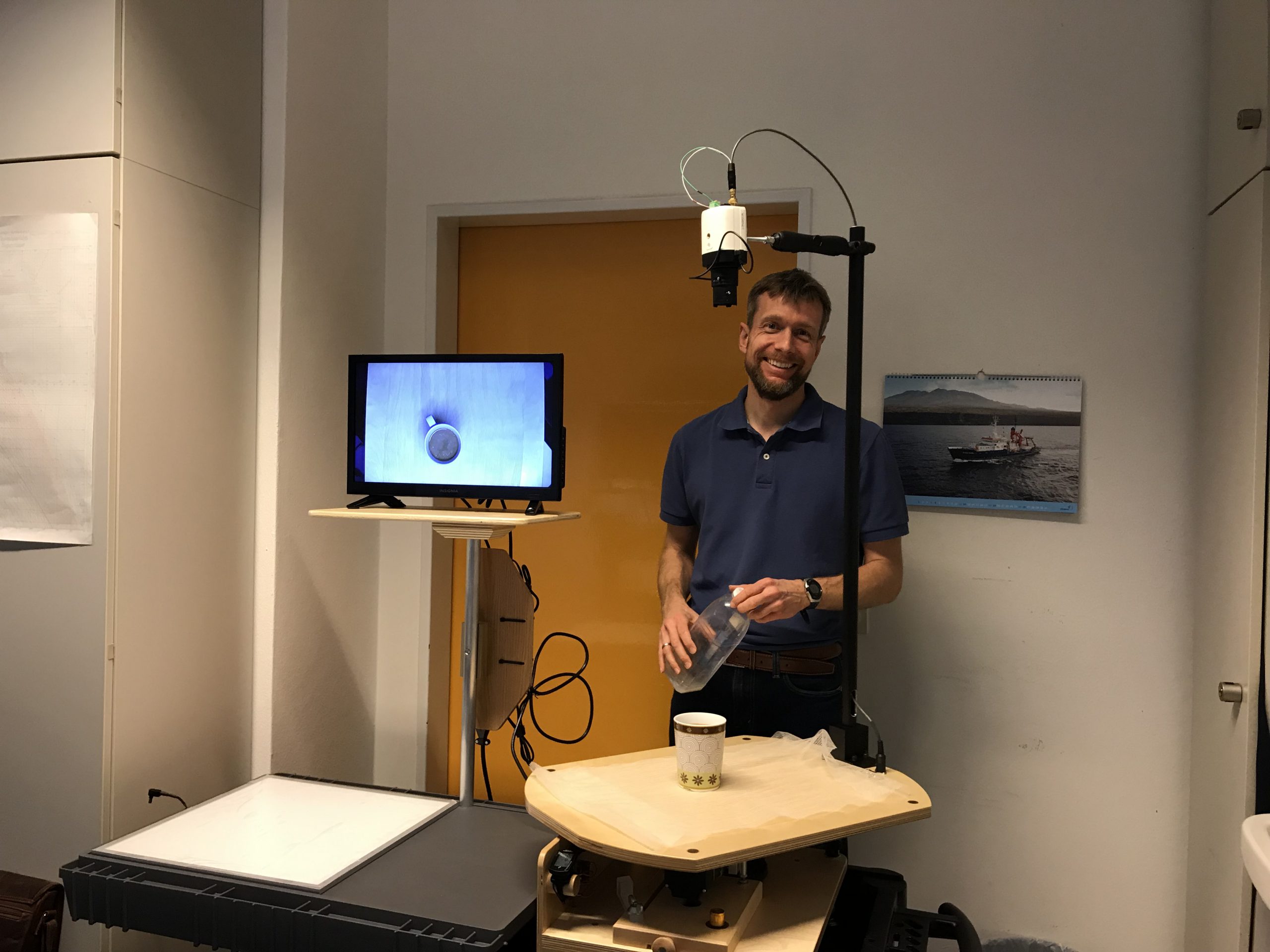
My friend Torge (who I had a super exciting rotating tank experiment project with, “Dry Theory 2 Juicy Reality“, check it out!), sent me the picture above and asked whether I had any idea what was happening there. I had not. But I had to find out! (Sorry to everybody else who wanted something from […]
![[annotated photo] Photo of water flowing over a weir, annotated with arrows showing particle velocities](https://mirjamglessmer.com/wp-content/uploads/2020/12/FotG.jpg)